O trabalho de conclusão de curso do acadêmico Thiago Pontes, egresso da Engenharia Eletrônica da Universidade Católica de Pelotas (UCPel), foi o momento escolhido para colocar um sonho antigo em prática. Entusiasta do aeromodelismo, o acadêmico viu na construção de um veículo aéreo não tripulado uma forma para aliar um momento de recreação com a aplicação de parte do conhecimento adquirido ao longo da graduação.
O desenvolvimento de um quadrotor vem ao encontro do interesse científico nesse tipo de construção, que a cada dia ganha novas utilidades como presença em áreas de difícil acesso para humanos, entregas de encomendas, estudos topográficos, captação de imagens aéreas, entre outras finalidades. Nesse cenário, explica Thiago, a busca constante por avanços tecnológicos de áreas como sensoriamento, com o desenvolvimento de rádios com maior alcance e menor consumo de potência e armazenamento eficiente de energia, faz com que estudos nesse tipo de equipamentos sejam constantes.
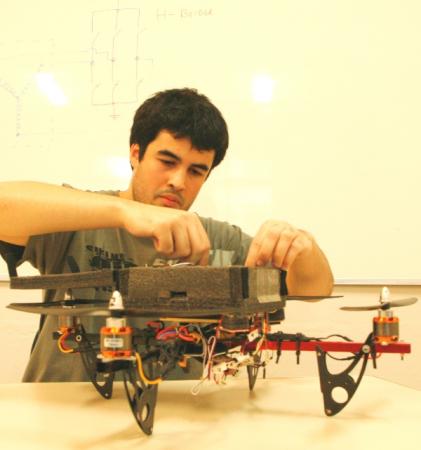
A plataforma desenvolvida pelo engenheiro tem como principal atrativo a capacidade de navegação autônoma e o baixo custo, visto que a construção do protótipo contou com a utilização de materiais alternativos e de fácil aquisição, como alumínio, madeira, EVA, isopor e espuma. “Utilizei esses materiais para a redução dos custos, mas sem comprometer a resistência do protótipo”, explica.
Composto por quatro motores elétricos – um para cada hélice que rotaciona em pares para gerar sustentação e controle direcional -, o quadrotor é administrado através de controle via GPS, o que possibilita a definição da rota de forma antecipada. De acordo com Thiago, uma das maiores dificuldades no desenvolvimento do veículo aéreo não-tripulado foi a confecção do controle devido à placa utilizada. “Cheguei a desenhar uma placa de como seria o controle, mas devido aos custos não foi possível mandar fabricar e tive que fazer adaptações”, conta.
O modelamento matemático, que simula no computador o comportamento do veículo, foi o ponto inicial do protótipo, e é utilizado para verificar sua reação em diferentes configurações, sem a necessidade de colocá-lo no ar. “Através do modelamento também podemos verificar novas possibilidades de controladores mais robustos para qualquer aplicação demandada pelo usuário do equipamento”, conta.
Logo em seguida, veio a parte mecânica – onde é definido o tamanho da hélice e potência do motor, que conta com 350 watts para cada hélice. Por querer fazer um modelo com motor mais potente que os demais da mesma categoria, boa parte das peças importadas foram sendo adquiridas aos poucos, através da internet. Também foram utilizados no protótipo componentes de software e hardware desenvolvidos por uma comunidade de usuários.
Com autonomia de voo de aproximadamente 15 minutos e com a massa de 1,8 quilos, o quadrotor pode chegar até dez metros de altura, e em testes realizados, obteve 56º/s (graus por segundo) como velocidade de reação, algo na média para quadrotores desse porte. Segundo o engenheiro, o veículo não-tripulado pode suportar carga extra de até quatro quilos, sem afetar a capacidade de controle.
Na avaliação de Thiago, através dos voos realizados pelo protótipo foi possível cumprir um dos objetivos principais do projeto, o de criar uma plataforma para a realização de trabalhos de alto nível, envolvendo modelamento matemático, controle e sistemas eficientes aplicados aos quadrotores e multirotores. “Ainda assim, existe um grande número de testes a serem realizados”, finaliza. Mas a ideia dele é continuar aperfeiçoando o equipamento, que é usado principalmente para recreação.

 / Notícias / Egresso da UCPel desenvolve veículo aéreo não-tripulado autônomo de baixo custo
/ Notícias / Egresso da UCPel desenvolve veículo aéreo não-tripulado autônomo de baixo custo